
Uma introdução ao Robot Operating System (ROS)
Published:
Nota de atribuição:
Este artigo foi originalmente publicado no site Embarcados em 2 de março de 2016.
Este conteúdo está republicado aqui com o objetivo de arquivamento e acesso contínuo.
Uma introdução ao Robot Operating System (ROS)
Este post faz parte da série ROS (Robot Operating System). Leia também os outros posts da série:
- Uma introdução ao Robot Operating System (ROS)
- Entendendo os nós do ROS
- Entendendo as mensagens e tópicos do ROS
- Criando um “Hello World” no Robot Operating System (ROS)
Se você está construindo um robô que possui diferentes módulos — como câmera, sensores laser, GPS, etc. — que precisam se comunicar entre si, você já deve ter se perguntado se existe uma maneira mais fácil de realizar essa comunicação. A resposta é sim!
Para facilitar a comunicação entre diferentes módulos, você pode utilizar o Robot Operating System (ROS). Usando o ROS, é possível criar uma arquitetura de processamento de dados em paralelo para controlar seu robô.
Por exemplo, imagine que você precise realizar cálculos pesados de processamento de imagem, mas o PC embarcado do robô não é suficiente. Você pode resolver esse problema criando um nó ROS em um PC mais poderoso e se comunicar via TCP/IP com o robô.
“ROS é um conjunto de bibliotecas e ferramentas que te ajudam na construção de aplicações para robôs. De drivers até algoritmos de última geração e com poderosas ferramentas de desenvolvimento, ROS possui o que você precisa para seu projeto de robótica. E o melhor de tudo: ROS é OpenSource.”
Conceitos básicos
ROS possui uma arquitetura simples. Em uma rede com máquinas rodando ROS, sempre existe uma máquina conhecida como MESTRE, que executa o comando roscore para inicializar os serviços necessários à comunicação entre os nós ROS.
Um nó ROS é basicamente um executável. Assim, é possível ter nós rodando em diferentes máquinas na mesma rede. A comunicação entre nós é feita via TCP/IP.
Cada nó pode publicar ou subscrever em tópicos, que funcionam como variáveis compartilhadas. Um nó pode escrever valores (publicar) ou ler valores (subscrever) desses tópicos. Assim, múltiplos nós podem se comunicar entre si.
Comunicação entre nós
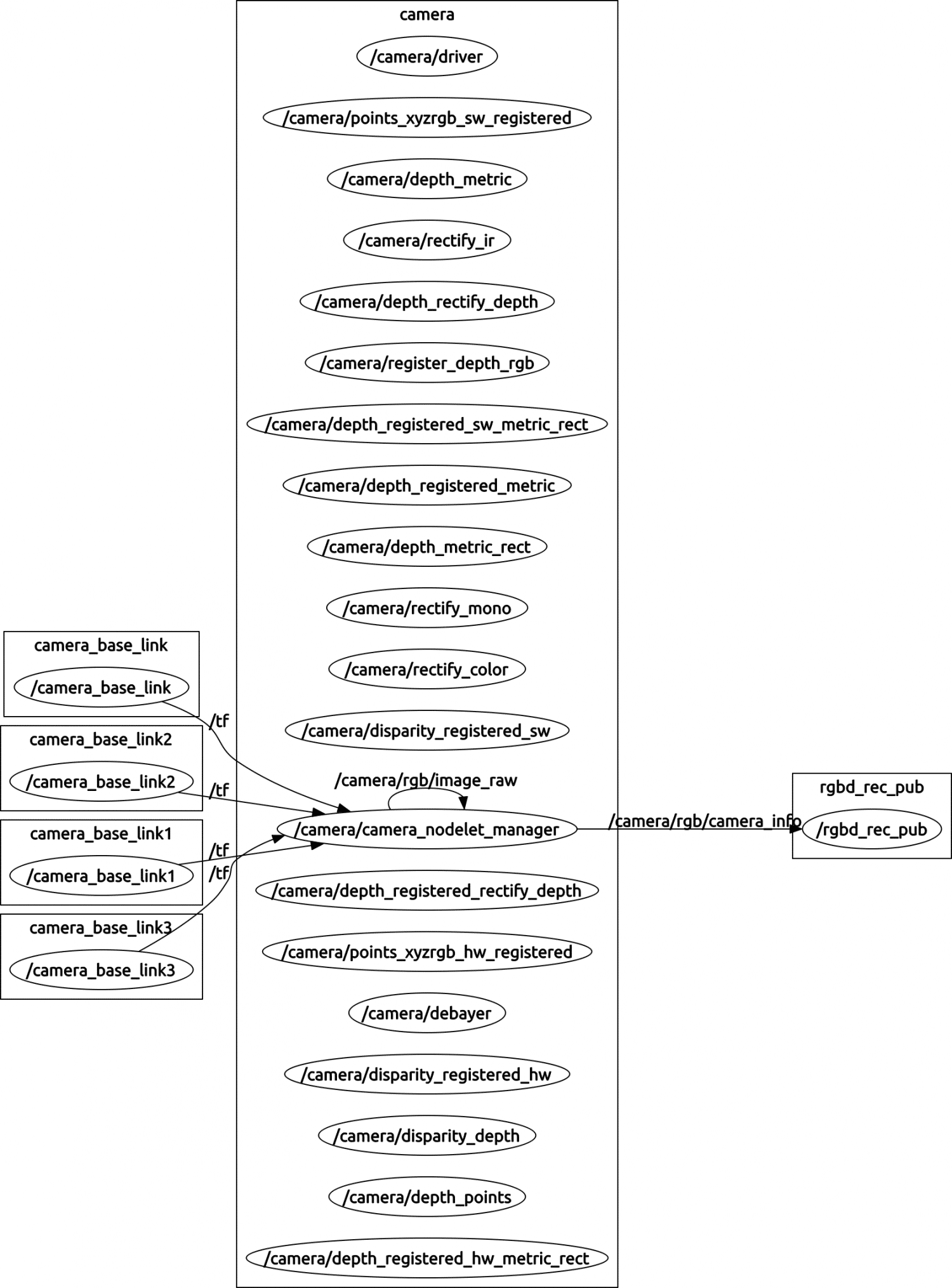 Figura 1: Ilustração da comunicação entre nós ROS. O nó
Figura 1: Ilustração da comunicação entre nós ROS. O nó /camera_base_link envia dados pelo tópico /tf para o nó /camera/camera_nodelet_manager.
Criação de pacotes
ROS oferece ferramentas para criação de pacotes em C++ e Python. Cada pacote pode conter um número arbitrário de nós. Para isso, é necessário ter conhecimentos básicos em CMake e terminal Linux. A criação de pacotes será abordada em tutoriais futuros.
Instalação do ROS (Robot Operating System)
Infelizmente, o ROS funciona apenas em Linux e macOS. Existe um projeto para portar ROS para Windows, mas está desatualizado.
Este tutorial mostra como instalar a versão ROS Indigo no Ubuntu 14.04 (64 bits).
1. Adicione o repositório ROS:
sudo sh -c 'echo "deb https://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2. Adicione a chave GPG:
sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 0xB01FA116
3. Atualize os pacotes:
sudo apt-get update
4. Instale o ROS Desktop completo:
sudo apt-get install ros-indigo-desktop-full
5. Inicialize o rosdep:
sudo rosdep init
rosdep update
⚠️ Sempre execute o
rosdepcomo usuário comum (não comoroot) para evitar problemas de permissão.
6. Configure o ambiente:
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
source ~/.bashrc
Pronto! Agora você tem o ROS instalado em sua máquina Linux. Nos próximos tutoriais, você vai ganhar mais familiaridade com os conceitos do ROS.